
The development of general-purpose robots capable of performing household chores has been a long-standing goal in the field of robotics. Such a robot would need to be versatile, adaptable, and capable of handling a wide range of tasks and environments commonly found in American homes. Achieving this level of capability remains a significant challenge.
Will a general household robot capable of performing household chores to a high level of reliability be developed before January 1st, 2030?
Resolution Criteria:
This question will resolve to "YES" if, before January 1st, 2030, a general household robot is developed anywhere in the world and has been publicly and credibly documented to have:
Demonstrated the ability to autonomously navigate and operate within a variety of residential environments, including:
a. Identifying and avoiding obstacles, such as furniture and pets.
b. Maneuvering through doorways, hallways, and multi-level spaces.
c. Adapting to different floor types and surface conditions (e.g., carpet, tile, hardwood).
d. Recognizing and safely handling fragile objects, such as glassware or delicate appliances.Exhibited proficiency in performing a comprehensive range of standard household chores, including at least 5 of these complete chores:
a. Cleaning tasks, such as vacuuming, sweeping, mopping, dusting, and tidying up clutter.
b. Laundry tasks, including sorting, washing, drying, folding, ironing, and putting away clothes.
c. Dishwashing tasks, like loading and unloading a dishwasher, or washing, drying, and putting away dishes by hand.
d. Cooking tasks, such as meal planning, ingredient preparation, cooking, and serving.
e. Maintaining indoor plants, including watering, pruning, and repotting.
f. Basic pet care, such as feeding, grooming, and cleaning up after pets.Shown the ability to adapt to user preferences and instructions, including:
a. Learning and adjusting to individual household routines and schedules.
b. Following specific instructions regarding cleaning methods, food preparation, or pet care.
c. Recognizing and responding to verbal and non-verbal cues from household members.Demonstrated a high level of reliability and safety while performing these tasks, with:
a. Consistently high-quality results that meet or exceed the performance of most humans performing the same tasks, within 500% of the average time it takes humans to perform these tasks.
b. A low rate of errors, accidents, or damages to the home or its contents. More specificially, it is required that, when given full instructions, the robot can fail no more than 5% of the time on average while completing a designated chore. A fail counts as any error that would require human intervention to fix, as otherwise the chore would not be completed to even a minimum level of satisfaction.
c. The ability to recognize and avoid potentially dangerous situations, such as electrical hazards or fire risks.
The development must be accompanied by independent reviews, testimonials, or high-quality case studies documenting the robot's performance in real-world residential settings, demonstrating its ability to perform tasks consistently and effectively, with a high level of satisfaction among users.
I will use my discretion when resolving this question, possibly in consultation with experts, to ensure that the criteria are met and that the general household robot is indeed capable of performing standard household chores to a high level of reliability.
 1,000
1,000People are also trading



@deletedaccount001 Every day we don't hear about some AI related company buying a million robots to train with real world data, my probability goes down. That's what I'd have expected by now.
@Primer hearing about lots of companies strapping cameras and motion sensors to humans to gather data
@0xseraphim Yeah, saw some tweets as well.
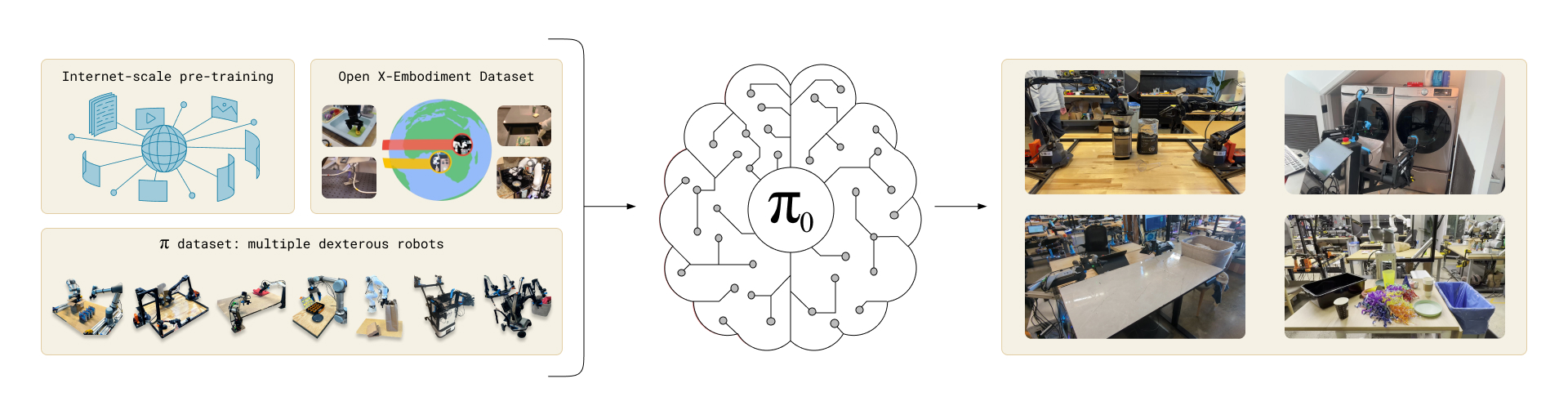
I'm a bit confused though. I had expected we'd try to teach a robotic hand how interaction with the physical world works and then finetune on a specific task (until later it becomes powerful enough to just manipulate the physical world as well as a human, like an LLM manipulates language as well as a human now, without the need to finetune). Instead it seems like they're trying to teach video/image AI what it looks like when a task is performed, and then in a second step somehow get a robot to mimic the movements? I'd expect that to work considerably worse, but of course there's way more prior work to rely on. If that's gonna be the way this'll work, it's gonna be pretty interesting: We'd be able to download individual skills, Matrix-style. Economically pretty smart, but I'd expect a more general approach to take off maybe 2-4 years later and pretty quickly outoerform specialized robots.
But time will tell whether this is a good take. If you know of a market corresponding to my szenarios, or a way to operationalize this for a market, I'm all ears.
@TomCohen almost all the proficiencies now (Figure 03 release): https://x.com/adcock_brett/status/1976272831450341655
@JamesBaker3 That looks incredible, but sadly doesn't seem to demonstrate much since the company could have set the tasks up, fine-tuned the training, done multiple takes, tried different iterations of the task set-up, etc., in a way that looks as impressive as possible while generalizing as little as possible.
@TomCohen Not really? Are you going to trust that thing with an iron? “Making progress on 2b” would be a fairer characterization
@JimHays I didn’t say it’s solved, I said it’s getting very close. My thinking: ironing is the only one in 2b that seem currently missing, all the rest of 2b are there to some degree or another (imperfectly! Would not meet the “high level of satisfaction” criterion yet). Compared to capabilities when the market opened and given how long we have for the 2030 deadline, to me this feels “very close”.
@TomCohen Last mile problems are a real thing. The other laundry tasks being there “to some degree” in a polished, edited promo video doesn’t really tell me much about whether it can reliably do any of those tasks in the real world. So it’s certainly progress, but I don’t know from that video that it’s even close on any of the other laundry tasks either
@NicholasMordin If someone posts evidence along these lines: https://www.youtube.com/watch?v=MMGD1Kvp1ig
But the robot can actually do anything useful, then I will update my robotics timelines. Little teasers, obviously artificial in-lab demos, and similar things don't really demonstrate general robotics capability, only engineering talent/investment/marketing competence.
When they perform well in arbitrary, unexpected, or adversarial environments, that's what should actually impress. All that being said, I don't necessarily think 60% is too high either, we've got ~4 1/2 years for more progress, some of which might start to benefit from early RSI from LMM/reasoning/newer innovative approaches.
For what price?
I would suggest at a price lower or equal to hiring humans for 5 years (due to possible fixed cost).
Also, the tasks listed wouldn’t require the robot to be working full time, so it’s more likely that this type of robotic work will be rented than bought. So the fixed cost would be born by the supplier, and be included in the hourly/daily rate.
Considering that a robot being able to do these things might do more valuable work such as working in a shop or warehouse, the hourly rate might be higher than a cleaning person or a cook. Economies of scale will always make it more valuable for a robot / worker to be deployed in an efficient pipeline (like being a chef in a restaurant or cleaning a mall instead of a home).
That means robot providers will rent out first to business before renting to customers, until that market has saturated completely, and there is still an oversupply of robot, or money to be made at the lower end.
It will be a slow progress to roboticize all businesses. Each passing year technology improves, opening new possibilities in business markets, making the opportunity cost of deploying robots in homes higher, and . Until the business market is fully saturated, which might take decades, no robot will walk in your home, just as you don’t have your personal suite of human assistants, unless you’re very rich.
@BoukeVersteegh Once people have bet on a market, the market criteria don't get changed unless a clarification of ambiguity is needed.
@BoukeVersteegh there’s no price cap mentioned in the description. In fact, the description doesn’t even require the robot to be generally available for purchase - just that the capabilities are evaluated by external parties. Bets so far were made based on that.
The development must be accompanied by independent reviews, testimonials, or high-quality case studies documenting the robot's performance in real-world residential settings, demonstrating its ability to perform tasks consistently and effectively, with a high level of satisfaction among users.
To me this paragraph strongly implies the robot should be available for purchase or at least as a lease, how else would there be a high level of satisfaction among users ?
@Odoacre being generally available for purchase is one way to get users. But so is being available for exclusive purchase for specific clientele, being available to rent/lease, spot contracting on demand, etc.
As long as people who aren’t the developer can use the robots and are happy with them, users are satisfied. They don’t have to own the robots, and they don’t have to be the general public. 🤷🏻♂️